高端裝備制造
分子蒸餾過程的多變量系統(tǒng)辨識方法
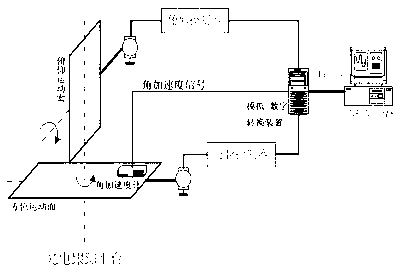
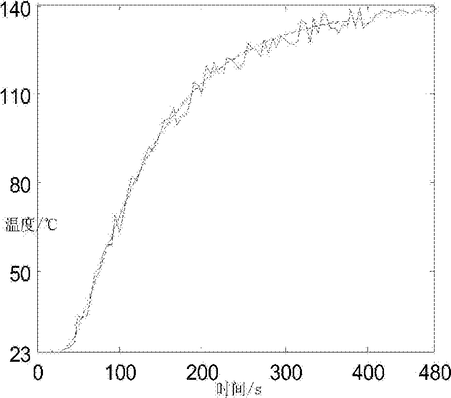
分子蒸餾過程的多變量系統(tǒng)辨識方法屬于分子蒸餾過程的數(shù)學(xué)模型建立方法領(lǐng)域��,該方法將分子蒸餾設(shè)備的蒸發(fā)系統(tǒng)簡化為一個兩輸入兩輸出的多變量系統(tǒng)��,利用成熟的最小二乘方法得出了蒸發(fā)系統(tǒng)模型,這種方法擺脫了對幾個特殊采樣點精確測量值的苛求���?���;趯嶋H工業(yè)運行數(shù)據(jù)對所得模型進行了驗證���,結(jié)果表明這種方法具有較高的辨識精度����,且實施方便��,易于工程實現(xiàn)����,方法同樣適用于一類工業(yè)過程的模型辨識。
長春工業(yè)大學(xué)
授權(quán)發(fā)明