高端裝備制造
一種變論域模糊PID雙液壓缸電液伺服同步控制方法
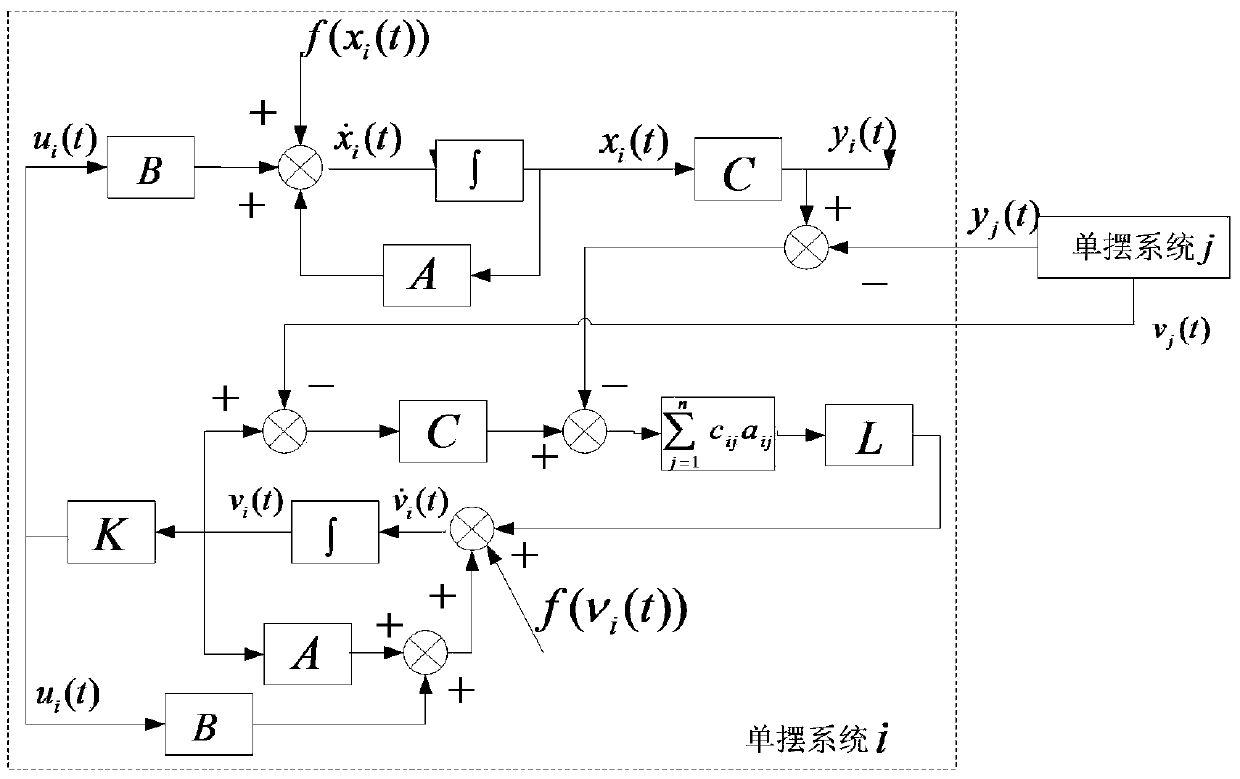
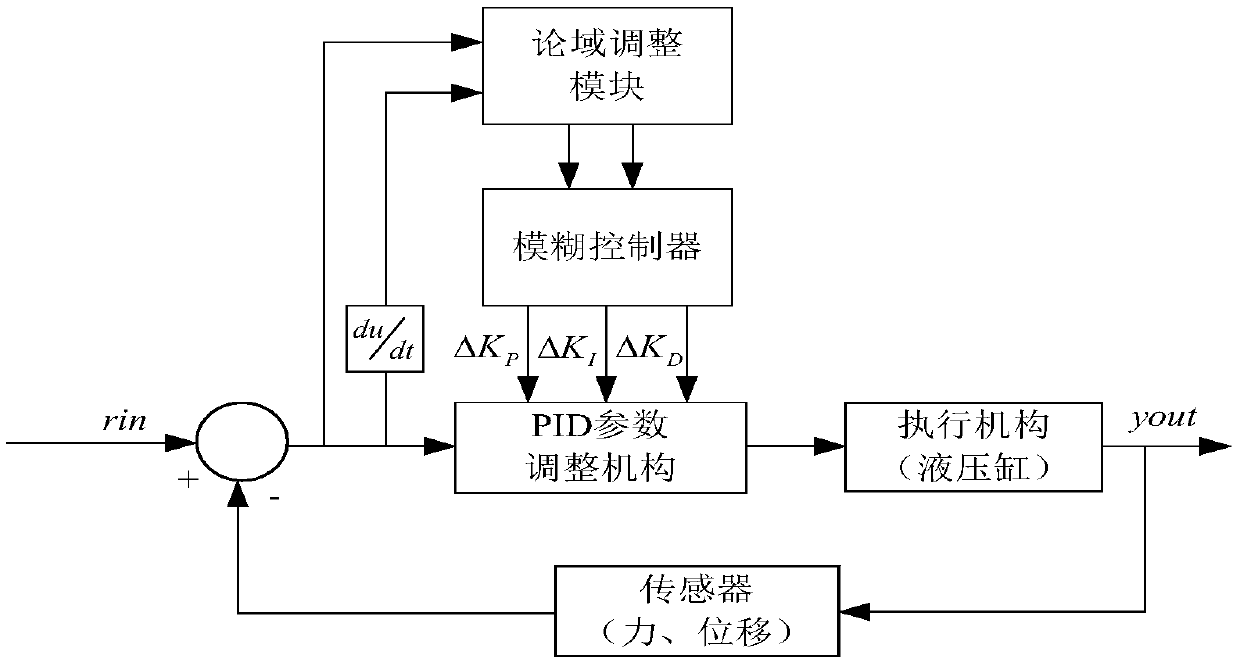
本發(fā)明屬于自動化控制技術(shù)領(lǐng)域,涉及一種電液伺服同步驅(qū)動系統(tǒng)的變論域模糊PID同步控制方法�����。該方法包括以下步驟:設計一種可根據(jù)輸入�����、輸出變量的大小進行自適應調(diào)整的論域伸縮因子�����;針對自由通道與調(diào)整通道�����,選擇不同的輸入變量,選ΔKP�、ΔKI作為輸出變量;對輸入變量進行模糊化處理�����;在論域零點處選三角形隸屬度函數(shù)�����,在靠近模糊論域邊界處選高斯型隸屬度函數(shù)�;制定模糊規(guī)則表;用Mamdani法則進行模糊推理��;對模糊量進行清晰化處理����,輸出到被控對象,進行控制�。本發(fā)明較傳統(tǒng)的變論域模糊PID控制器的動態(tài)協(xié)調(diào)性好,控制精度高�,且通用性高。
長春工業(yè)大學
授權(quán)發(fā)明